Robotic Interventions to Prevent Slip-Induced Falls During Bipedal Locomotion
On Thursday, February 25, ASEF Professor Mitja Trkov, Ph.D., Assistant Professor of Mechanical Engineering, Rowan University, held an interesting lecture on robotic interventions to prevent slip-induced falls during bipedal locomotion as part of our ASEF Speaker Series program.
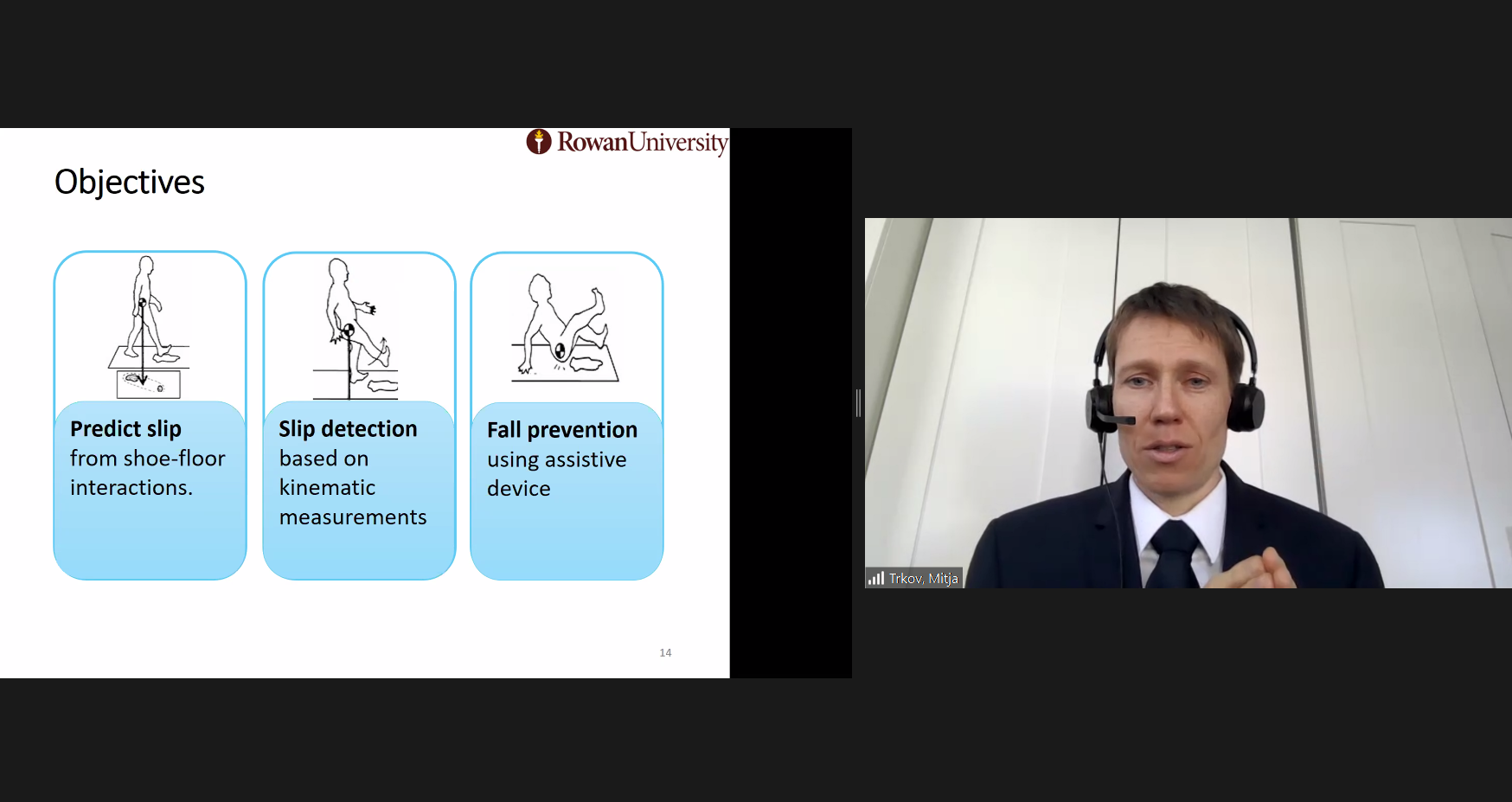
In his lecture, prof. Trkov explained how research regarding slips and trips is done. Slips can happen to us at any given time in various locations, and they can even happen to robots! His team dealt with the research questions, what can be done regarding the slip-and-fall problem, how a slip can be detected, and how it can be predicted in real-time. Slipping is a very fast process; therefore, a fast reaction is needed. Although we do not think about it much, a very complex strategy is behind our reactions!
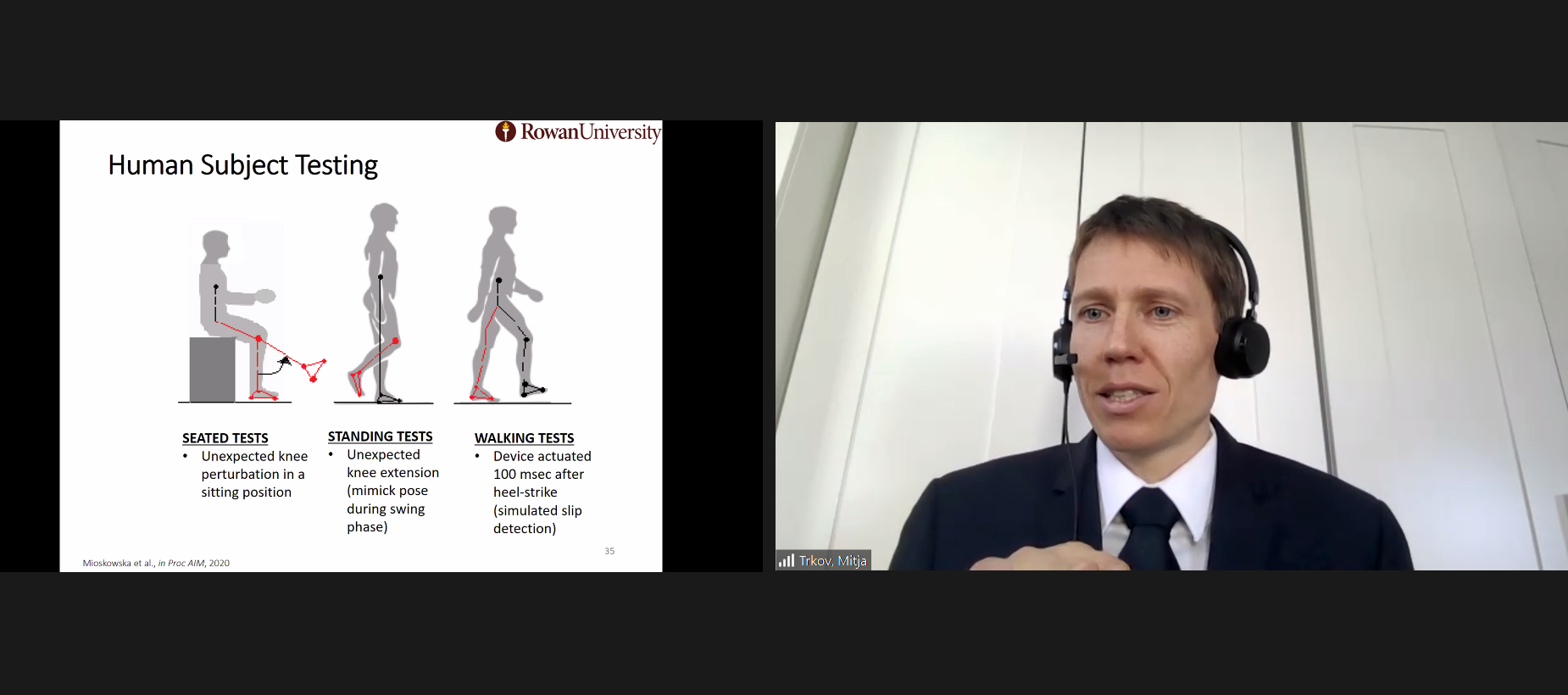
With his team, prof. Trkov examined what happens during the fall, the importance of friction, and how to detect a slip as soon as possible. They have successfully built an exoskeleton, which has helped them in their research. Prof. Trkov sees his future research, especially in analyzing different age groups’ reactions to slips and falls, to improve the current exoskeleton.
The event was part of our ASEF Speaker Series program and was moderated by ASEF Junior Fellow Tim Poštuvan.